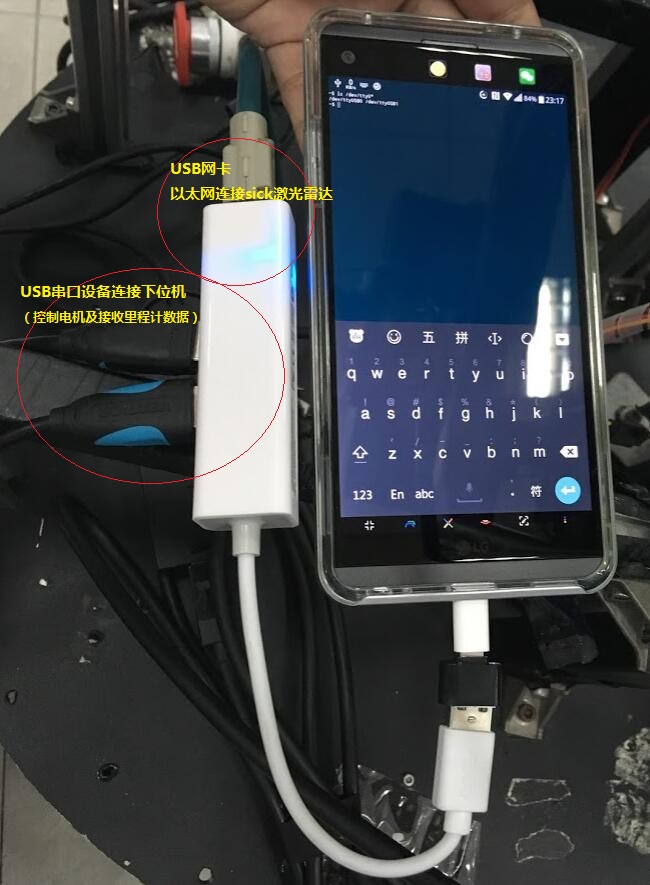
我们的机器人通过两个FTDI的「USB To TTL」芯片与下位机(STM32单片机)通信,一个用来控制电机运动,一个用来接收里程计数据及控制手臂舵机(ROS里的move_base那块东西)。
通过以太网连接一个SICK的激光雷达(LMS1XX)实现SLAM导航(ros里的gmapping那块东西)。
好了原来一直是拿PC&Ubuntu跑。
既然Android是个Linux系统,
最主要的是看了下ROS官网,源里直接有armhf及arm64架构的包(deb packge for Ubuntu)
那么在Android上通过chroot跑一个完整(内核还是原来的,所以只是重新跑一个 systemd init程序,以及后面的东西)的Linux发行版,然后就可以跑ros了。
首先呢通过OTG和一个带USB网卡的USBHUB(带USBHUB的USB网卡?)来连接两个USB串口设备和激光雷达